小型軽量ハニービー用赤外線受信機が完成し、受信機の調整もどうにか終了しました。ハニービーへの実装・飛行に挑戦します。ちゃんと飛んでいた物を分解したので、飛ぶかどうか不安です。
既に半身のハニビなので、実装は簡単です。製図用テープでぺたっと貼り付けました。バッテリは底面にマジックテープ留めです。バッテリを移動して重心調整を行います。
 |
 |
| 3枚におろされたハニビへ受信機を組み込みます | テープでお手軽装着しました |
 |
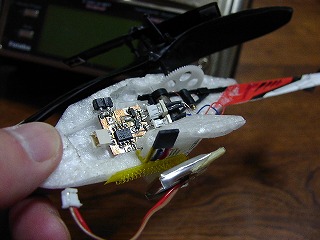 |
| 配線はこんな感じ | 70mAHリポはここへ、センサーも底面配置です |
・床に置いて、スロットルを上げると強烈な左ドリフトが発生し、床上を吹っ飛んでいくので、ハンドリリースにより離陸させます。浮力を感じるまでスロットルを上げてからふわりと手を離します。エルロンが欲しい・・・。(スロットル2付近のテールミキシングを上げればうまくいくかもしれません・・未だ成功してません。)
・飛ばしながらスロットルカーブを調整し、飛ばしやすい位置を見つけました。
・スロットルの位置により、テール出力ミキシングするレボリューションミキシングを使って、テールが落ち着く位置に調整します。このミキシングは本来、ヘリコプタの離陸時に発生する反動トルクを抑えるためにあります。上空飛行時にはOFFにするのが普通ですが、ハニビに上空飛行はない?ので、常にONにして便利に使います。
・ラダーのトリムは1chエルロンに割り当ててあります。左右半分以上にスティックを動かすとトリム動作となります。トリム動作時はラダー100ステップのうち、+−2ステップずつ、上乗せします。連続動作を抑えるために、100msのウエイトが入ります。
・ラダーが敏感すぎる場合、EXPを入れると操縦が楽になります。
・最初、70mAHリポを搭載したところ、浮上しませんでした。床上でぐるぐる回るだけです。30mAHリポでは電流値不足なのか、やはり離陸できません。70mAHリポをきちんと充電してから離陸させると軽々と上昇しました。モータが2つあるために電流値不足は致命傷のようです。付属のFullRiver50mAHリポも試してみます。
・最初の怪しい設定をなんとか済ませて、ハニービーが飛んだ時は久しぶりに感激を味わえました。初めてのヘリコプタ用赤外線受信機が動作したので、とてもうれしかったです。それにしてもハニビの基本設計は優秀です。
・メインロータのPWM周期が上がったので、ロータの回転はとてもスムーズです。スロットルの上下に機体の上昇・下降が追従してくる感じです。
・テールモータの回転もスムーズになり、微調整ができるようになったので、くるりんと回る左旋回ではなく、スムーズな左旋回ができるようになりました。テール操作とスロットルコントロールの組み合わせで思った方向へ動かすことができます。
・オリジナルハニーはスロットル制御でテールのかなりの部分をコントロールしていたので、テールを抑えるためにスロットルを上げる→上昇する→天井にぶつかる・・・というパターンが多かったのですが、高度を保ったままで、旋回することができるようになりました。(ビデオでそう見えませんかねぇ〜)
・私のハニーは壁際までいくと、吸い込まれるように激突・墜落の道をたどっていましたが、これを回避できるようになりました。
・受信機で設定したレボリューションミキシングは、やはり調整が必要です。スロットル2付近をアップ、4,5付近をダウンの必要がありますが、プロポで調整した方が格段に楽です。ミキシング無しの場合、手動でラダーコントロールを行えば飛行は可能です。(人間ジャイロは難しいですね、ジャイロの偉大さを改めて再確認しました。)
・何よりも、自分で設計・製作した赤外線受信機でこんなちっちゃなハニービーが飛行できたことがとてもうれしいです。
 |
 |
| こうして飛んでいるとノーマルのようですが・・ | うわっ、まるでキカイダー・・・ |
 |
 |
| けっこう・・・ | 余裕の飛行です |