自作赤外線受信機搭載のハニビが思ったよりもうまく飛んだので、構想だけを温めていた2.5ch化に挑みました。
素晴らしいハニビの3ch、4ch化が発表されています・・・おいでなんしょ!が出したハニビ改造の結論は・・・「カナード2.5ch化」です。(他の改造はすごすぎて・・・私には無理です。)
・カナード翼を付けると角度により前進スピードが変えられることに注目して可変カナード翼を増設する。
・カナードはマグネットアクチュエータにより駆動し、PICの3ポートパラレルで強力に動かす。
・PICのポートは片側動作なので、2.5chとなります。
というものです。
受信機にはマグネットアクチュエータ用回路も実装されており、ファームウエアも対応しているので、カナードとアクチュエータを取り付ければ完成です。
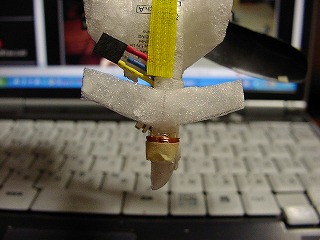
・可変カナードは下に垂れ下がった状態(=オープンと呼びましょう)で前進、収納された状態(=クローズ)でホバリングする設計のつもりです。
・マグネットアクチュエータコイルは85Ωのものを使用しました。コイル6φ0.05UEW線400回巻きです。
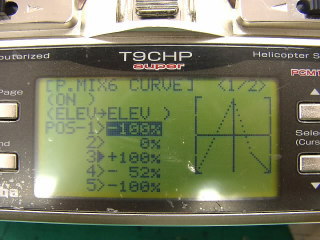
・2chエレベータスティックで前進・ホバリングを切り替えるために、エレベータからエレベータにプログラムミキシングしています。ニュートラルでカナードクローズ、ダウンでカナードオープンです。クローズ時には3ポート目一杯の電流が流れるので、メイン・テールロータの回転がぎりぎりです。ファームウエアで対応すればいいのですが、横着しました。
・メインロータの下に実装したので、ロータの風圧を心配しましたが、フルスロットルでもクローズが可能です。
・ホバリングとまではいかないにしても、せめてスピードコントロールくらいはできるとうれしいです。
・カナードの位置はここでいいかどうか、角度・面積は?とまだまだ実験することが多い実装です。
飛行結果は今しばらくお待ちを・・・。
 |
 |
| カナード取り付け完了! | こんな感じです |
 |
 |
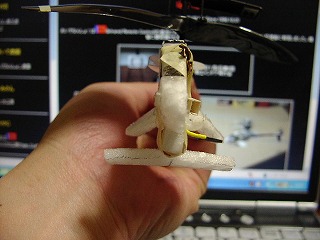
| キカイダー側 | 全体図 |
 |
 |
| ボトムビュー | トップビュー |
 |
 |
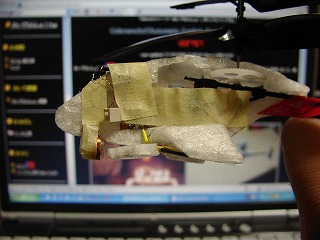
| フロントビュー | サイドビュー |
 |
 |
| これでホバリングと・・・ | 前進の切り替え・・になるはず! |
 |
 |
| マグネットアクチュエータをエレベータよりオープンクローズさせるための設定・・・2chスティックセンターでカナードをクローズさせています・・・ちょっと変則的設定です | 同じく、リバース設定 |