僴僯乕價乕梡愒奜慄庴怣婡偺僾儘僩僞僀僾偑姰惉偟偨偺偱丄彫宆壔偵挧愴偟傑偡丅
亂巇條亃
丒儊僀儞儘乕僞偼僴乕僪僂僃傾PWM惂屼偲偟丄1.95kHz偱嬱摦偡傞丅(10價僢僩丄100抜奒)
丒僥乕儖儘乕僞偼500Hz埲忋偱嬱摦偡傞丅(100抜奒)
丒慜恑婡峔偲偟偰丄PIC偺3億乕僩傪愙懕偟偰丄儅僌僱僢僩傾僋僠儏僄乕僞傪嬱摦偡傞丅偙偺傾僋僠儏僄乕僞偱摦梼傪摦偐偟偰丄慜恑(屻戅偼偲傝偁偊偢側偟)丒儂僶儕儞僌傪愗傝懼偊傞丅(偱偒傞偐側丒丒丒丠)
丒庴怣婡偱僥乕儖儈僉僔儞僌傪峴偆丅
丒僥乕儖僩儕儉傪1ch僄儖儘儞偵妱傝摉偰傞丅
丒憲怣婡偼帺嶌4ch愒奜慄憲怣婡偲FF9亄奜晅偗憲怣儐僯僢僩傪僞乕僎僢僩偵偡傞丅
丒僶僢僥儕偼70mAH儕億1僙儖枖偼晅懏偺50mAH儕億傪巊梡偡傞丅
僾儘僩僞僀僾偲摨偠偱偡丅
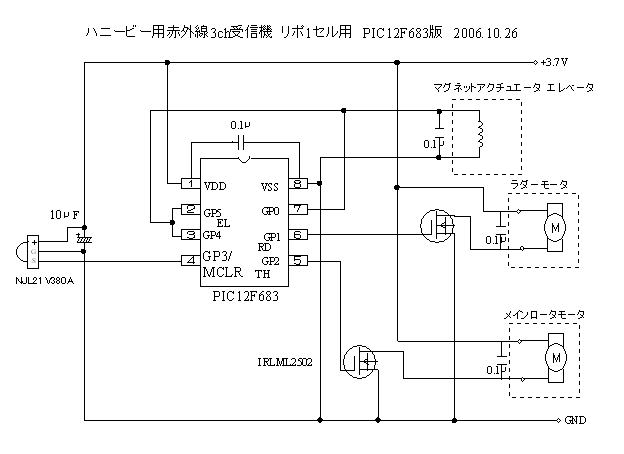 |
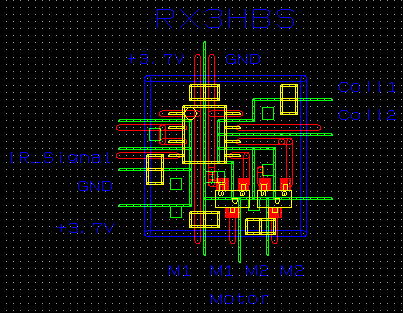
丒12F683偺昞柺幚憰僞僀僾傪巊梡偟丄彫宆壔偟傑偟偨丅
 |
 |
| 姰惉偟偨庴怣婡 | 廳偄偱偡偹(T_T) |
 |
丒1ch僄儖儘儞僗僥傿僢僋偵儔僟乕僩儕儉傪妱傝摉偰傑偟偨丅僗僥傿僢僋傪敿暘傛傝塃丄傑偨偼嵍偵摦偐偡偲僩儕儉摦嶌偵擖傝丄2億僀儞僩偢偮曄壔偟傑偡丅偙偺娫丄100ms偺僂僄僀僩偑擖傝丄楢懕摦嶌傪梷偊傑偡丅
丒丒丒儅僌僱僢僩傾僋僠儏僄乕僞偺憰旛偼屻夞偟偵偟偰丄傑偢偼晛捠偵旘傋傞偙偲傪擮摢偵挷惍偟傑偟偨丅
(1)帺嶌4ch愒奜慄憲怣婡
丒僗儘僢僩儖傪忋偘傞偲丄僥乕儖儌乕僞偑夞揮偟傑偡丅抧忋偐傜偺棧棨傪帋傒傑偡偑丄嵍曽岦傊僪儕僼僩偟偰偟傑偄丄柍棟偱偡丅晛捠偺僿儕僐僾僞偲摨偠傛偆側嫇摦傪帵偟傑偡丅
丒儔僟乕傪挷惍偟側偑傜僴儞僪儕儕乕僗偡傞偲側傫偲偐旘偽偡偙偲偑偱偒傑偡偑丄埨掕偵偼傎偳墦偄忬懺偱偡丅
丒1ch僄儖儘儞僗僥傿僢僋偵妱傝摉偰偨僩儕儉婡擻偼摦嶌偟傑偡丅
丒庴怣婡偺僥乕儖儈僉僔儞僌偩偗偱偼怱嫋側偔丄嫇摦偑埨掕偟傑偣傫丅挷惍婡擻傪帩偨側偄憲怣婡偱偺憖廲偼擄偟偄偱偡丅
(2)FF9H亄愒奜慄憲怣儐僯僢僩
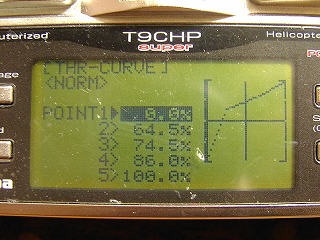
丒僗儘僢僩儖僇乕僽傪挷惍偟偰丄憗傔偵夞揮偑忋偑傞傛偆偵偟傑偟偨丅
丒儗儃儕儏乕僔儑儞儈僉僔儞僌傪挷惍偟偰丄僥乕儖偺埨掕傪恾偭偰偄傑偡丅棫偪忋偑傝晅嬤偺儈僉僔儞僌偼憹傗偟偨曽偑椙偄偐傕偟傟傑偣傫丅
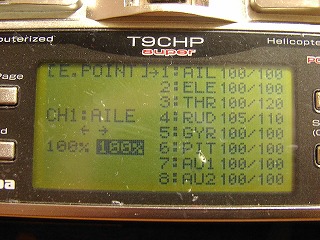
丒憲怣僷儖僗暆偵庒姳偺偢傟偑偁偭偨偺偱丄僄儞僪億僀儞僩偱挷惍偟傑偟偨丅
丒儔僟乕偑晀姶側偺偱丄EXP傪擖傟偰壐傗偐偵偟偰偄傑偡丅
丒庴怣婡懁偱僗儘僢僩僇乕僽偲儗儃儕儏乕僔儑儞儈僉僔儞僌傪擖傟傑偟偨偑丄晄廫暘偱偟偨丅挷惍屻偺抣傪嶲峫偵嵞搙僾儘僌儔儈儞僌偡傟偽夝寛偟傑偡偑丄偦偙傑偱偺崻惈偼偁傝傑偣傫丒丒丒m(_ _)m丅
丒僿儕僐僾僞偱偼挷惍婡擻偼懡偄曽偑抐慠曋棙偱偡丅愒奜慄挻彫宆庴怣婡偼昞柺幚憰宆PIC傪巊偄丄婎斅偵敿揷晅偗偟偰偟傑偆偺偱丄僼傽乕儉僂僄傾偺曄峏偼偐側傝柺搢偱偡丅偦偺偨傔偵丄敳偒嵎偟壜擻側DIP僞僀僾傪巊梡偟偨僾儘僩僞僀僾偱奐敪偟偰偐傜彫宆壔偟傑偟偨丅偨偩丄僾儘僩僞僀僾偱偼旘峴偝偣傞偙偲偼偱偒側偄偺偱丄旘峴挷惍偑偱偒傑偣傫丅FF9H愱梡偱庴怣婡傪奐敪偡傟偽丄憲怣婡懁偱偺挷惍偑壜擻偵側傝丄僼傽乕儉僂僄傾偺晧扴偼偐側傝寉尭偝傟傑偡丅
 |
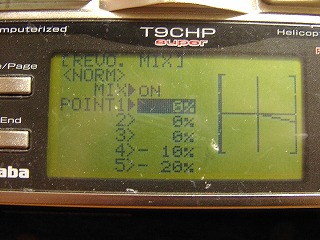 |
| 僗儘僢僩儖僇乕僽 | 儗儃儕儏乕僔儑儞儈僉僔儞僌 |
 |
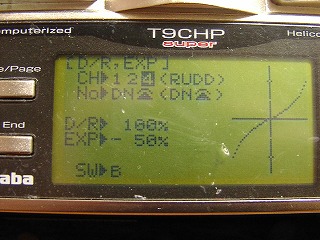 |
| 僄儞僪億僀儞僩偺挷惍 | 儔僟乕偺傒EXP傪愝掕偟傑偟偨 |